In the high-accuracy versions on the left, you can see that the points match the location of the wall.
In the high-accuracy versions on the left, you can see that the points match the location of the wall.
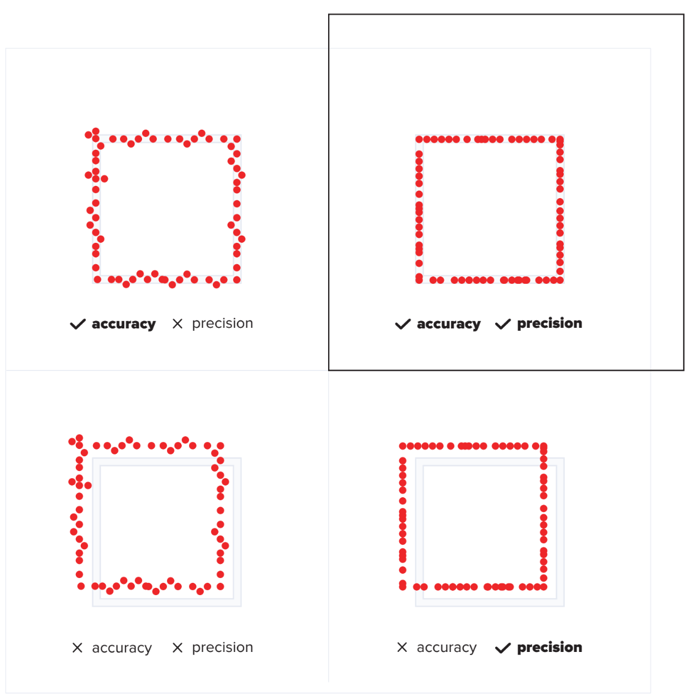
A precise point cloud, as shown on the left, has little “noise” - the points closely match the shape of the real-world object
On the left, there is a wall that we scanned to get the points used for the standard deviation calculation. As you can see in the bull curve, 66% of points with the Surveying payload fall +/- 6mm of reality.
When there are fewer geometric features, as in highly symmetrical environments, it is harder for the LiDAR to detect key features of reference that enable it to correctly interpret its surroundings, causing it to accumulate drift.
This vertical cross-section through the floor and ceiling of the basement shows the Rev 7 and FARO Connect results closely matching the TLS point cloud (in red) compared to the Rev 6.2 results, shown in green.
The variety of geometric features in this bridge section meant that drift was reduced.
Ground truth data and Elios 3 data ICP'd at the take-off location and drift calculated at 4 defined intervals.
Here you can see cross sections at various points along the bridge with distance measurements included.
This tunnel has few clear geometric features to help reduce drift in a LiDAR scan.
4 targets were mounted in the sewer and Elios data ICP'd to ground truth.
Over 250m of tunnel, just 0.63% drift was found.
A diameter of less than 2 meters and a smooth, symmetrical structure makes this space more challenging for LiDAR scans.
The target positions on site are placed at different angles as georeferencing points.
Top down view of the water tunnel process with targets at the start and inside of the next manhole.
Here, the Rev 7 data processed in FARO is shown in blue, compared to the Rev 7 and Flyaware in brown. There is 4-5% or more drift when comparing the FARO optimized processing and Flyaware with no global optimization.
| Environment | Configuration 1 | Configuration 2 | |
|---|---|---|---|
| Elios 3 & FlyAware | Surveying Payload & FARO Connect | ||
| Structured environments |
| 1x 0.5-1% drift | 5-10x ~0.1-0.2% |
| Nominal symmetric environments |
| 1x ~2% drift | 5-10x ~0.25-0.5% |
| Challenging symmetrical environments |
| 1x 2-5% drift | 4-5x 0.5-1% (80% success rate) |
| Very challenging symmetrical environments |
| 1x 5+% drift | 1-2x 2-5% (50-80% success rate) |